| davidbuckley.net |
| home > | TecArm0 < TecArm5 > TecArm6 | 3 October 2022 |
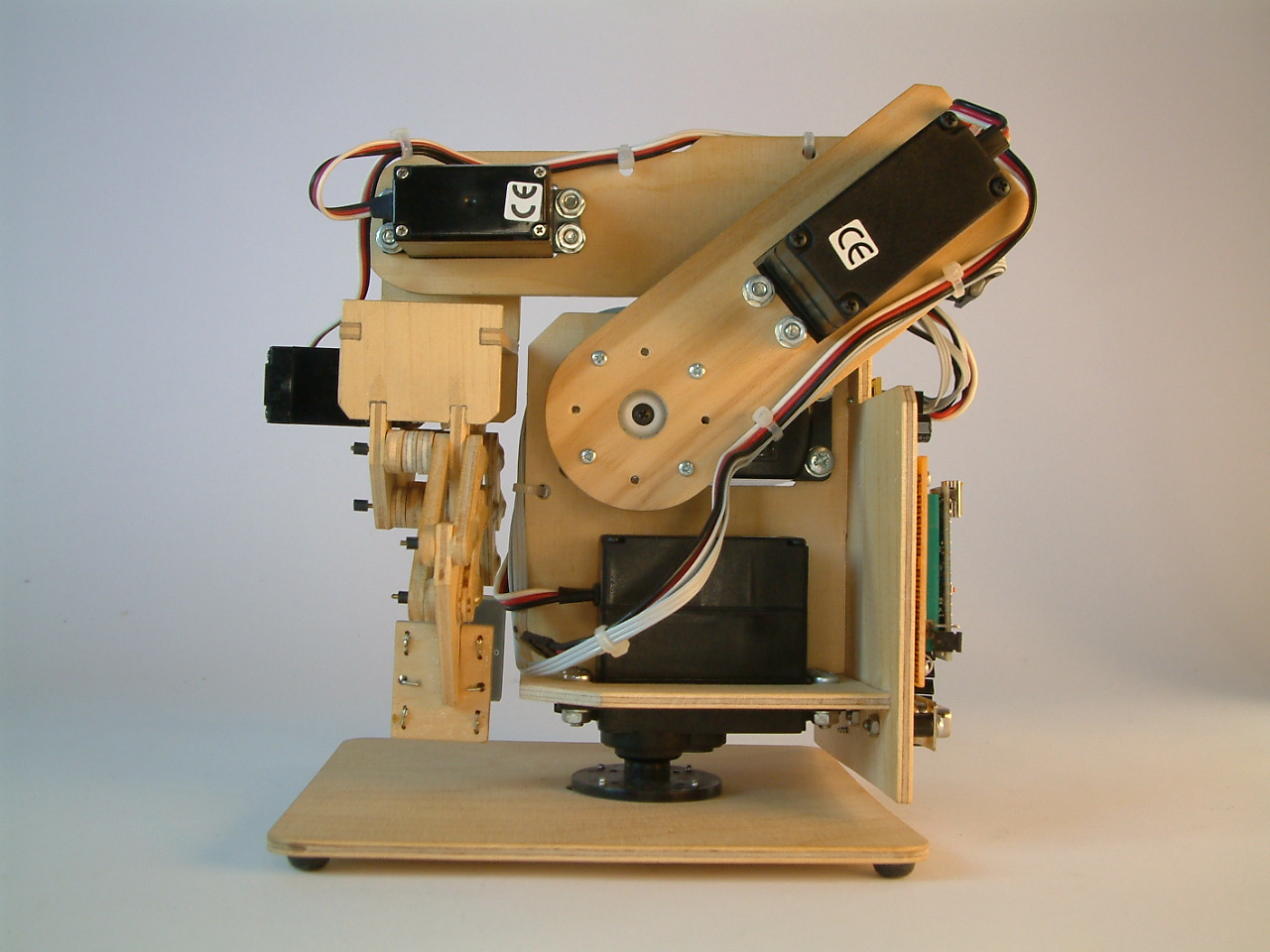
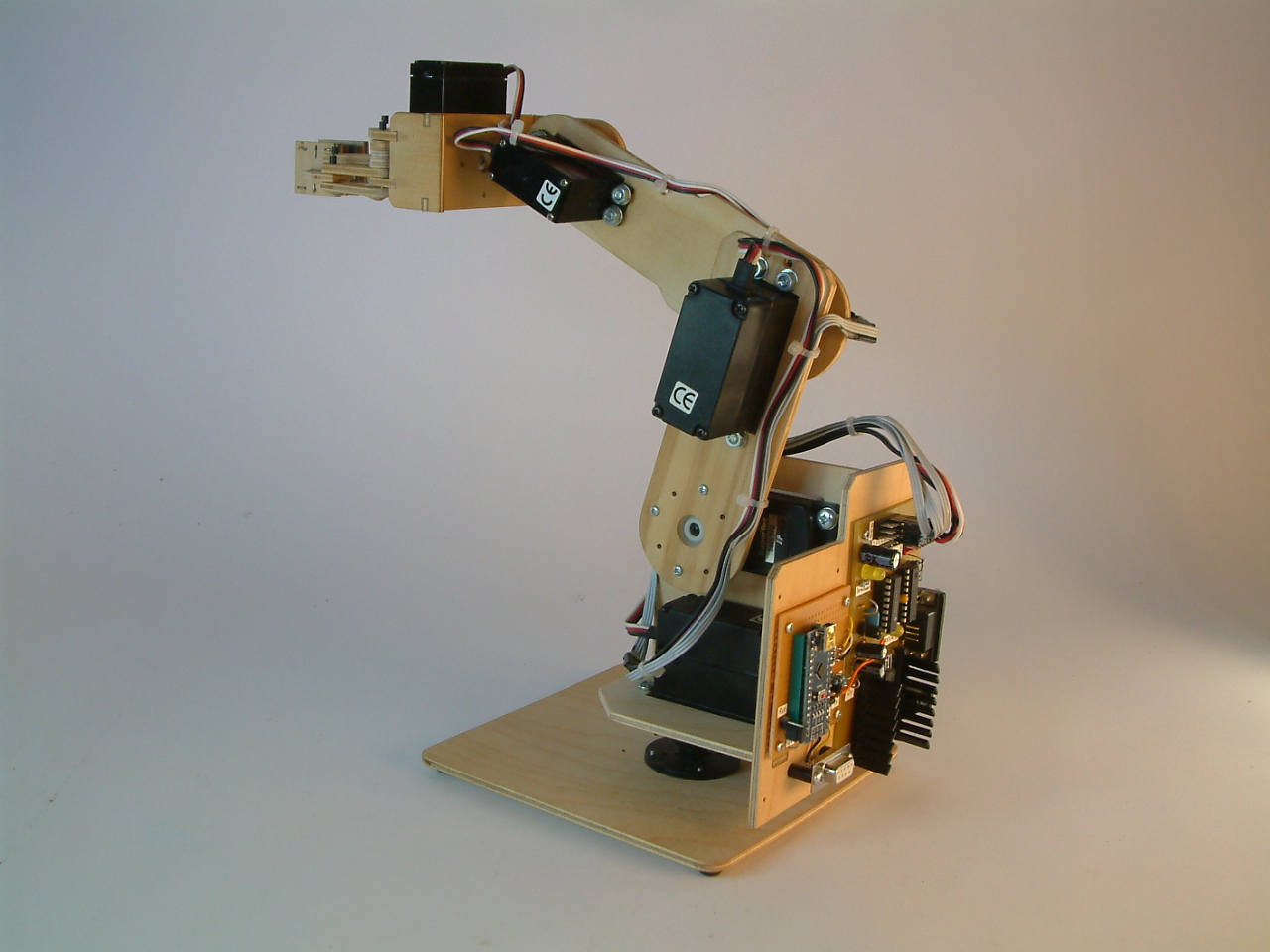
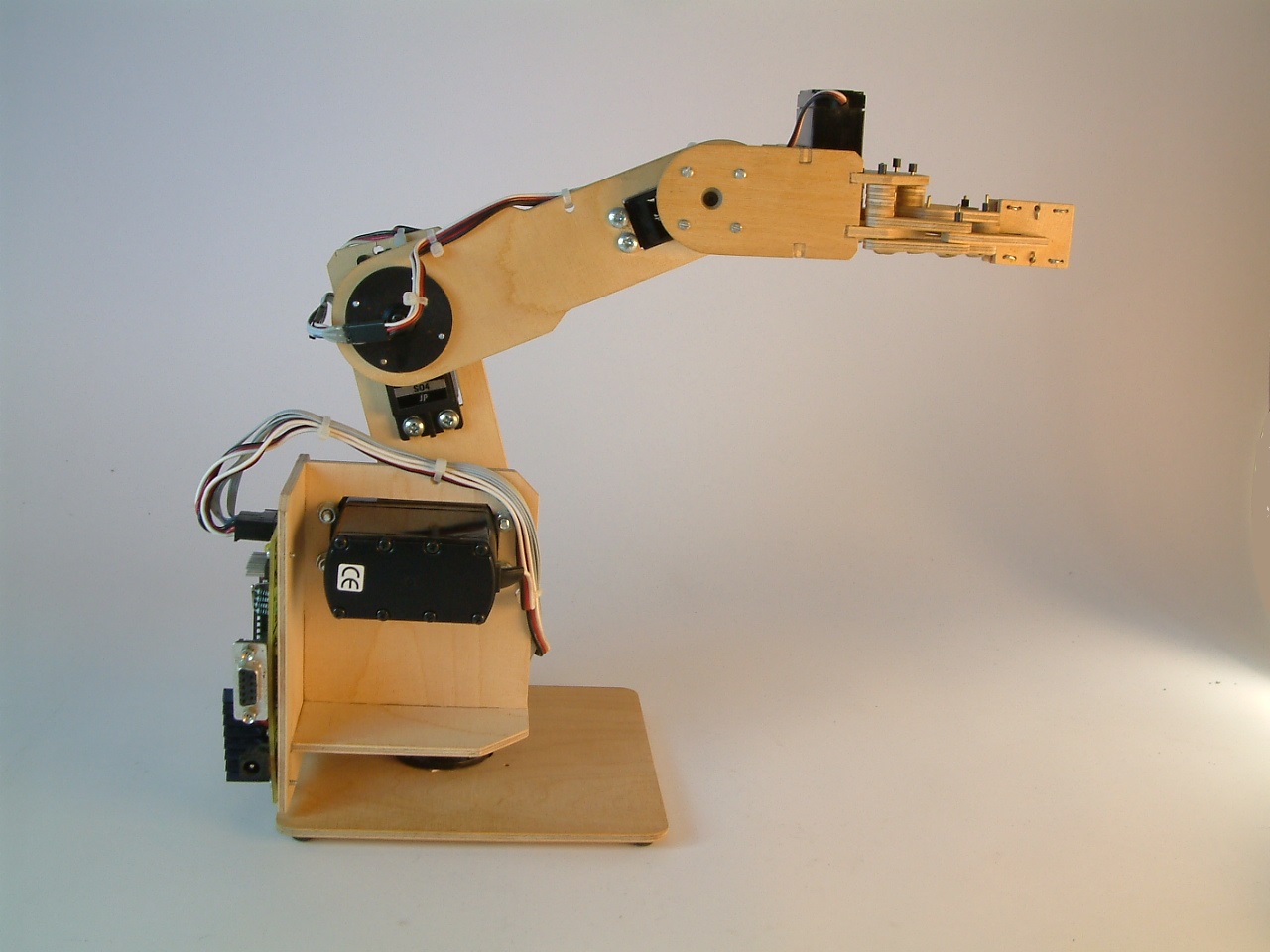
| TecArm5 prototype by David Buckley | 1999 |

|

Milford produced a GUI for the arm but it doesn't run on modern computers.
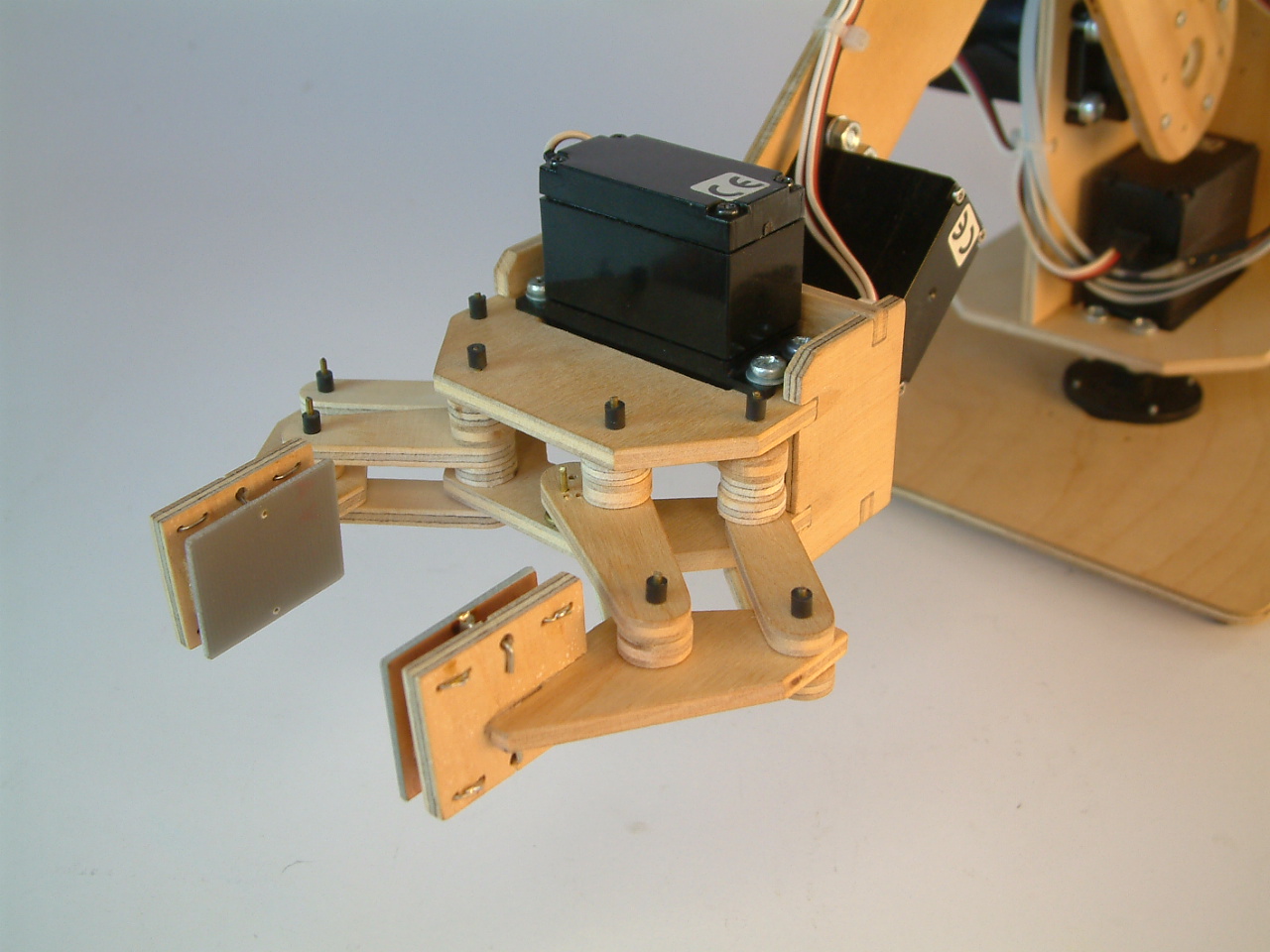
When designing the arm I envisaged a small video camera mounted on the top plate of the Gripper, just in front of the servo.
In 2020 I added an Arduino Nano to receive high level commands and to store sequences of commands.
The commands can be received over USB but because when the arm moves the cable could be pulled and damage the socket I added a standard RS232 D9.
Unfortunately over the years some of the wood has developed a slight warp.
- TecArm commands
The commands allow the arm to be positioned in a Pose and the servo values recorded as one of eight Poses.
A sequence of Poses can be assembled into one of sixteen Acts which can then be replayed. - TecArm6Control - the Arduino control program for both the TecArm5 and TecArm6.
- TA_Manual-5_507inst.pdf the Milfords manual for the TecArms.
- The original TecArm page for the Milford arm.
- Circuit diagram.
Dimensions Upper Arm - Shoulder to elbow = 90 mm Fore Arm - elbow to wrist = 125 mm Hand - Wrist to fingertips = 100 mm Gripper - opening = 85 mm At 125mm extension - lift = ~450 g At maximum extension ~315mm - lift = ~200 g Servos Waist JP SuperTec S04 10Kg.cm @4.8v, 13Kg.cm @6v Shoulder JP SuperTec S666/STD 18Kg.cm @4.8v, 22Kg.cm @6v Elbow JP SuperTec S04 10Kg.cm @4.8v, 13Kg.cm @6v Wrist JP SuperTec S06/2BB 7.2Kg.cm @4.8v, 8Kg.cm @6v Gripper JP SuperTec S03 3.4Kg.cm @4.8v, 4Kg,cm @6v








































TecArm5 circuit

| home - top |