| davidbuckley.net |
| home > Baldur > | 15 October 2021 |
Baldur Gallery
Baldur is a four servo 9 inch (225mm) high biped walking robot, controlled by a PicAxe40x2.
Baldur is driven by four servos and powered by four AA cells.
Baldur can walk Forwads, Backwards, turn Right and Left, step Sideways and Kick.
Baldur can lie down and Crawl Forwads, Backwards, and turn Right and Left, then stand up again.
Baldur can get up from any position if it falls over.
The Black Box holds 4AA cells.
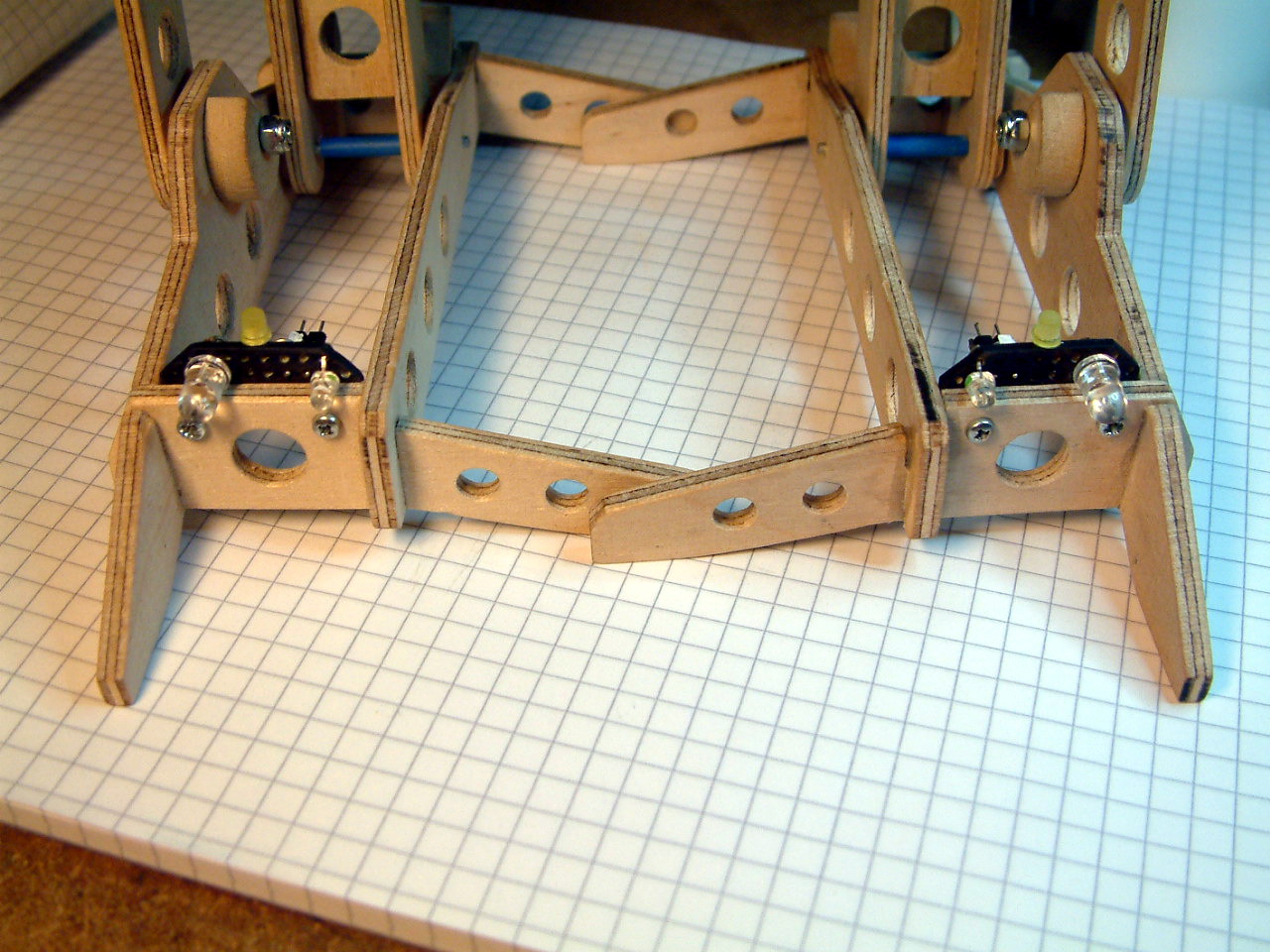
On the face and on the feet there are forward facing high power orange LEDs for illuminating obstacles which then can be detected by the black shrouded phototransitors next to them.
There are contact switches on each foot for detecting table edges.
Long range sensing can be done by the Ultrasonic ranger module.
Being Aesir, Baldur has Blue LED 'eyes' which are dim when waiting for a command and bright when executing one.
The 'eye' state can can also be set by the user as a HMI.
Baldur can play sounds and Ring-tunes from its onboard speaker.
Baldur can store sixteen user inputed 16 character command strings in its memory.
There is a socket for extra memory so hundreds of commands could be stored.
Baldur can be instructed by commands from a Sony IR remote-control.
The full set of instructions can be sent serially as text over cable or a plugin radio module.
Baldur has an on-board command-help file.
Gallery Sections
2017-11-13
2017-10-05 - Baldur Kitted-out
Ground Sensor
2015-06-06 - Optical Toe Feelers
Circuit Board
2014-09-23 - First Assembly
2017-11-13

2017-10-05 - Baldur Kitted-out


Ground Sensor


2015-06-06 - Optical Toe Feelers



Circuit Board

2014-09-23 - First Assembly







